0
A 지점에서 B 지점까지 최단 경로를 찾는 코드가 있습니다. 이렇게하려면 A 성급 변형을 사용하고 있습니다. 2 차원 배열을 사용하여 2 차원 그리드를 사용하고 있지만 경로가 대각선 바로 가기를 사용하지 않고 왼쪽, 오른쪽, 위, 아래 만 사용합니다. 지금까지 가능한 한 최단 경로를 항상 찾지 않는다는 것을 제외하고는 모든 것이 잘 작동합니다. 무엇이 잘못되고, 왜 잘못되고, 어떻게 해결할 수 있는지 알고 싶습니다. 미리 감사드립니다.최단 경로 문제가 발견되지 않는 별표 구현
이BTW : 수학 벡터는 내 코드 (경로 찾는 클래스는 다음의 헬퍼 클래스, 첫 번째) 여기
과 : 여기
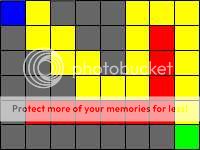
정확히 무슨 일이 일어나고 있는지 설명하는 그림입니다 기하학적 포인트 클래스 이상은 아닙니다. playerTileLocation과 enemyTileLocation은 모두 그리드의 시작과 끝 노드에 해당하는 포인트입니다. 또한 정규 객체 대신 맵의 모든 타일 노드로 AStarNode 클래스를 사용합니다.package {
import src.Characters.Character;
import src.InGame.Map;
import src.Maths.MathVector;
public final class BaseAI {
// REPRESENTS UP, DOWN, RIGHT, AND LEFT OF ANY ONE NODE
private static const bordersOfNode:Array = new Array(
new MathVector(-1, 0), new MathVector(1, 0), new MathVector(0, -1), new MathVector(0, 1));
private var _player:Character;
private var map:Map;
private var playerTileLocation:MathVector;
private var openList:Array;
private var closedList:Array;
// 2D ARRAY OF MAP TILES (I DON'T USE HERE, BUT I PLAN TO IN FUTURE)
private var mapArray:Array;
private var originNode:AStarNode;
private var complete:Boolean;
public function BaseAI(_player:Character,map:Map):void {
this._player = _player;
this.map = map;
openList = new Array();
closedList = new Array();
mapArray = map.tiles;
}
public function get player():Character {
return this._player;
}
public function calculatePlayerTileLocation():void {
playerTileLocation = map.worldToTilePoint(player.groundPosition);
}
//WILL EVENTUAL RETURN A DIRECTION FOR THE ENEMY TO TAKE THAT ITERATION (EVERY 1-2 SECONDS)
public function getDirection(enemy:Character):String {
var enemyTileLocation:MathVector = map.worldToTilePoint(enemy.groundPosition);
originNode = new AStarNode(enemyTileLocation, playerTileLocation);
originNode.setAsOrigin();
openList = [originNode];
closedList = [];
complete = false;
var currentNode:AStarNode;
var examiningNode:AStarNode;
while (!complete) {
openList.sortOn("F", Array.NUMERIC);
currentNode = openList[0];
closedList.push(currentNode);
openList.splice(0, 1);
for (var i in bordersOfNode) {
examiningNode = new AStarNode(new MathVector(currentNode.X + bordersOfNode[i].x, currentNode.Y + bordersOfNode[i].y),playerTileLocation);
if (map.isOpenTile(map.getTile(examiningNode.X, examiningNode.Y)) && !examiningNode.isThisInArray(closedList)) {
if (!examiningNode.isThisInArray(openList)) {
openList.push(examiningNode);
examiningNode.parentNode = currentNode;
}else {
}
if (examiningNode.X == playerTileLocation.x && examiningNode.Y == playerTileLocation.y) {
complete = true;
var done:Boolean = false;
var thisNode:AStarNode;
thisNode = examiningNode;
while (!done) {
if (thisNode.checkIfOrigin()) {
done = true;
}else {
thisNode = thisNode.parentNode;
}
}
}
}
}
}
}
}
}이 코드를 통해
package {
import src.Maths.MathVector;
internal final class AStarNode {
private var _X:int;
private var _Y:int;
private var _G:int;
private var _H:int;
private var _F:int;
private var _parentNode:AStarNode;
private var _isOrigin:Boolean;
public static const VERTICAL:uint = 10;
public function AStarNode(thisNodeLocation:MathVector, targetNodeLocation:MathVector) {
X = thisNodeLocation.x;
Y = thisNodeLocation.y;
H = Math.abs(X - targetNodeLocation.x) + Math.abs(Y - targetNodeLocation.y);
G = 0;
F = H + G;
}
public function set X(newX:int):void {
this._X = newX;
}
public function get X():int {
return this._X;
}
public function set Y(newY:int):void {
this._Y = newY;
}
public function get Y():int {
return this._Y;
}
public function set G(newG:int):void {
this._G = newG;
}
public function get G():int {
return this._G;
}
public function set H(newH:int):void {
this._H = newH;
}
public function get H():int {
return this._H;
}
public function set F(newF:int):void {
this._F = newF;
}
public function get F():int {
return this._F;
}
public function set parentNode(newParentNode:AStarNode):void {
this._parentNode = newParentNode;
}
public function get parentNode():AStarNode {
return this._parentNode;
}
public function setAsOrigin():void {
_isOrigin = true;
}
public function checkIfOrigin():Boolean {
return _isOrigin;
}
public function isThisInArray(arrayToCheck:Array):Boolean {
for (var i in arrayToCheck) {
if (arrayToCheck[i].X == this.X && arrayToCheck[i].Y == this.Y) {
return true
}
}
return false
}
}
enter code here
}
와우, 나는 별의 그 부분에 대해 완전히 잊어 버렸고, 이제 왜 이상하게 행동했는지 알 수 있습니다. – Xiler